8月23日,河北清华发展研究院人工智能与机器人创新中心携最新成果亮相2017世界机器人大会。这次展示的主要成果包括仿人灵巧手系列(图1)和基于数据手套的人机交互系统(图2)。
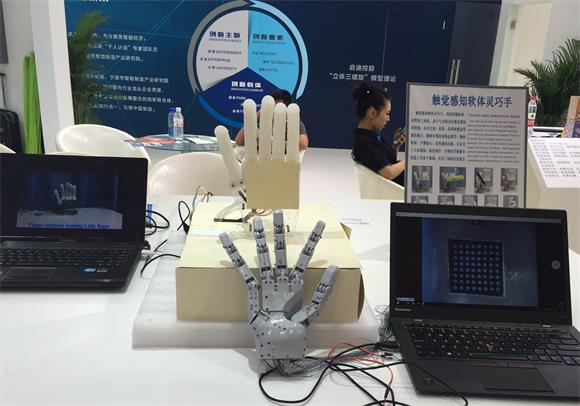
图1 仿人灵巧手系统展示

仿人灵巧手系列包括了仿人软体灵巧手、仿人运动灵巧手及多模态感知仿人指尖。软体灵巧手通过气动控制方式,可以实现柔软地无损抓取、手势展示;仿人运动灵巧手有22个自由度,通过肌腱运动方式实现机械手的灵巧精细操作;多模态感知仿人指尖通过微视觉技术可以实现纹理和三维力的同时测量。仿人灵巧手系列为机器人末端的精细灵巧操作提供了多种类型的产品。
基于数据手套的人机交互系统由技术负责人方斌主导研制,其中数据手套可以完整捕获人体手势动作信息,利用这些信息来便捷控制机器人。该款数据手套可以精细捕捉整个手臂和手指的加速度、速度、角速度、姿态、位置等运动信息,利用这些信息可以用于人机交互、手语识别和康复评估。这次大会展示的是利用了手臂和手掌运动信息,控制瑞森可机器人的7个自由度机械臂,使得机器人可以实时快速跟随人手运动。这套演示系统在展会上非常受欢迎,观众都积极踊跃要求体验(如图3、图4所示)。

图3 小学生体验通过数据手套控制机器人系统

图3 湖南卫视主持人体验通过数据手套控制机器人系统
人工智能与机器人创新中心是由清华大学计算机系孙富春教授带领的类脑计算与认知团队和河北清华发展研究院联合成立的,专注于发展人工智能与机器人相关技术,为河北省乃至京津冀的协同发展做出贡献。该团队在机器人视觉、机器人触觉感知、机器人抓取操作、机器人控制与学习、人机交互学习等技术上在国内外产生重要影响,近两年应邀在IEEE CYBER 2016,ELM2016和IEEE ICRA 2017,IEEE ROBIO 2017做大会报告和特邀报告。该团队应用瑞森可机器人在IROS2016的“机器人抓取与操作”国际比赛中夺冠,该成果已经应用于生产线或物流线上的自动质量检验和智能分拣。
本届世界机器人大会为期5天,以“创新创业创造 迎接智能社会”为主题,聚集全球专家智慧,集结世界顶尖企业,共同展示机器人行业最新科技成果。



